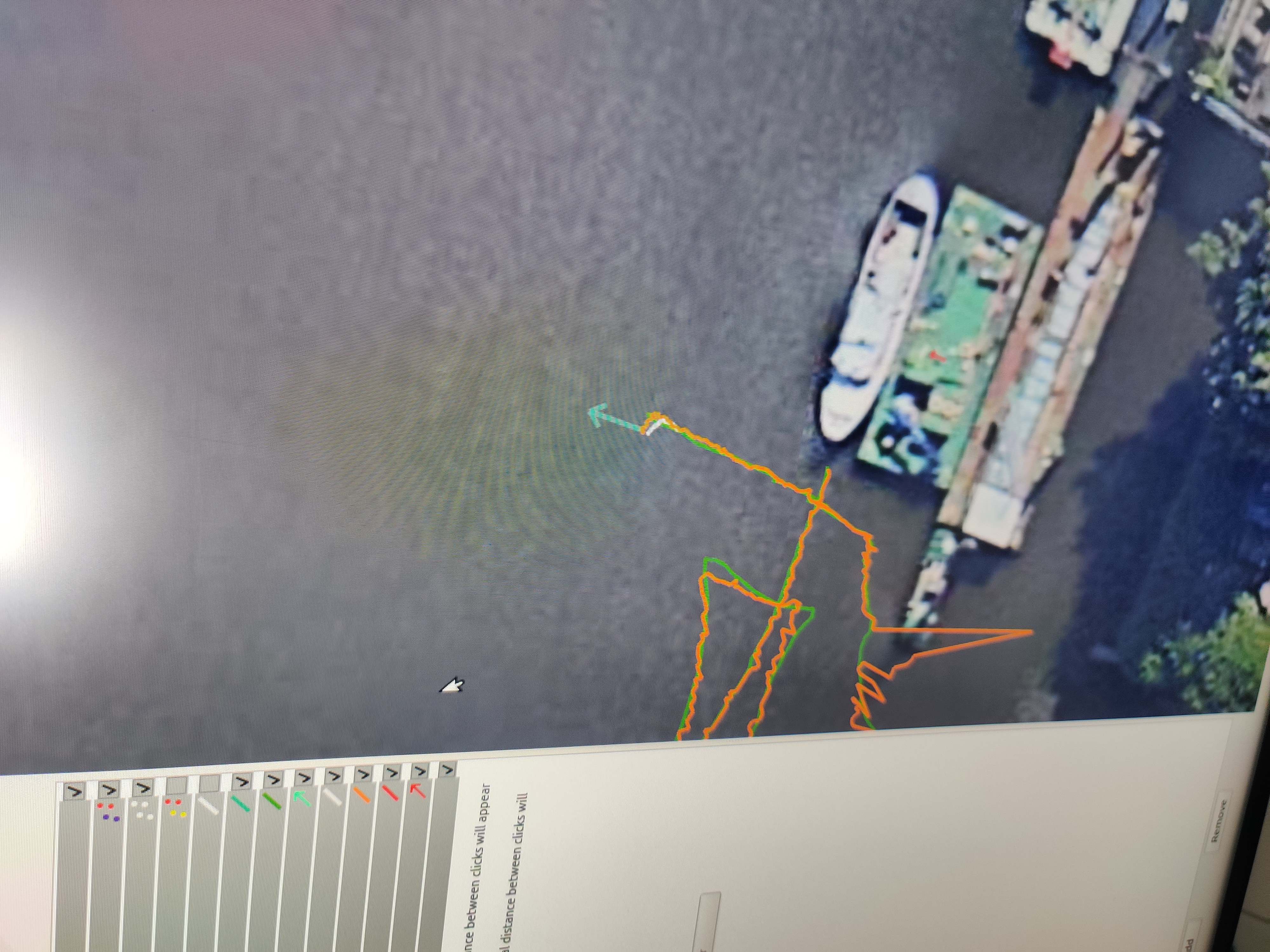
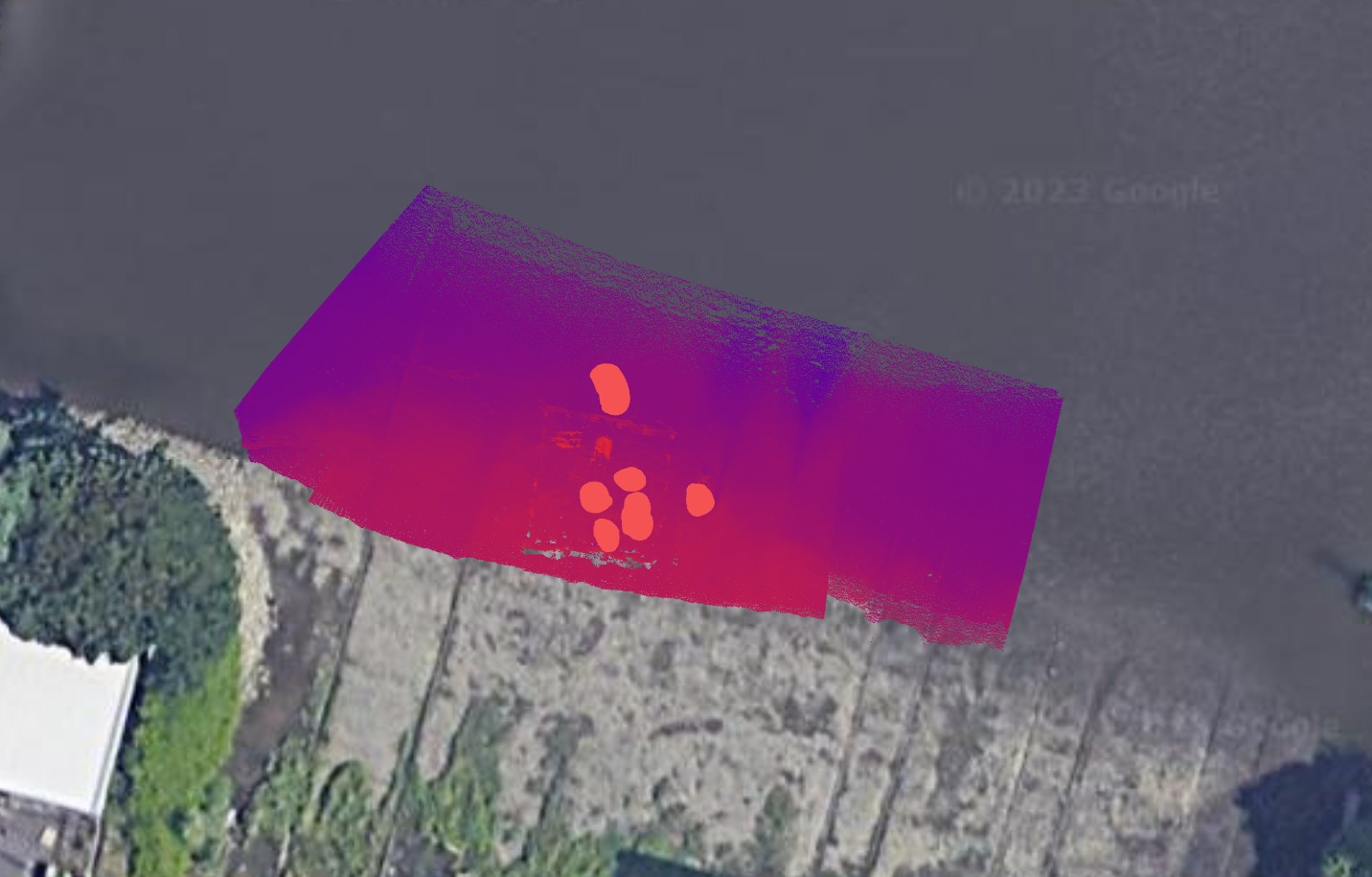
After almost four years of work, the final SeaClear demonstrations took place in the second week of October in Dubrovnik. On the 9th of October, our researchers demonstrated the capabilities of the SeaClear system in Bistrina bay, a region with intense mariculture activity. After placing litter samples in the water and mapping their true locations via attached buoys with the UAV, the SeaCAT performed a bathymetry scan, which revealed the initial positions of the litter. Then the observation ROV (mini-Tortuga) did an automated, detailed scan of the hotspot area to further detect smaller litter. Finally, the collection ROV automatically picked up the litter.
 SeaCAT with Basket and ROVs ready to be deployed at Bistrina bay
SeaCAT with Basket and ROVs ready to be deployed at Bistrina bay
The second demonstration took place on the 12th of October on the shores of Lokrum island. The full SeaClear pipeline was tested, amid different water conditions from Bistrina: deeper, but with better visibility. Moreover, the litter found in Lokrum is more related to tourism and is therefore slightly different in nature. In addition to litter mapping and collection, this time around, litter items were also deposited in the litter basket. This is the first time that the full pipeline of the SeaClear system has been demonstrated on the same site, which is a huge step towards cleaning up the sea floor!
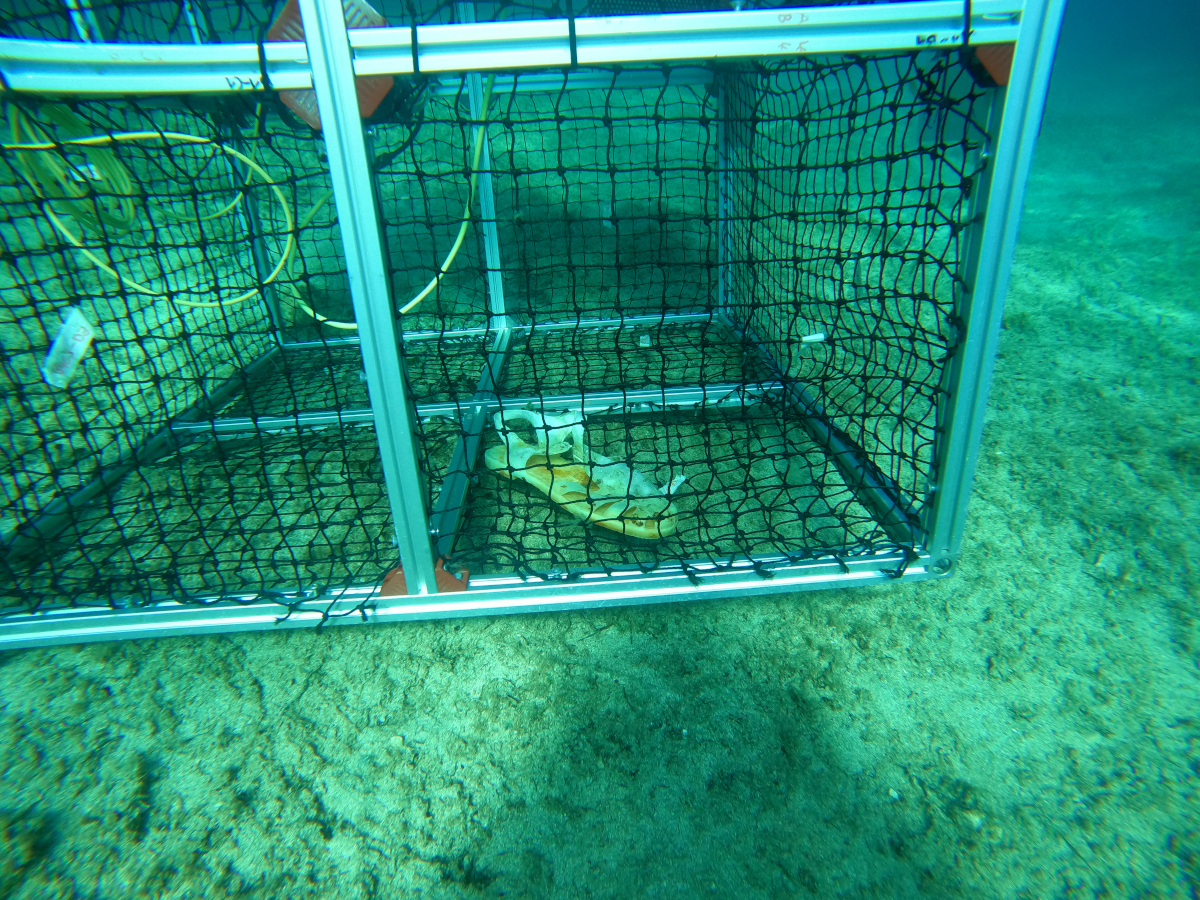 Litter deposited succesfully inside the collection basket
Litter deposited succesfully inside the collection basket
During this second demonstration, the research team together with EU evaluators were on-board the Naše More vessel, while the media and local-authority representatives were onboard the Zrinski boat. Underwater live streams were available on both ships, together with explanations of what is happening at each stage. This allowed journalists and evaluators to understand and better follow the steps taken for underwater litter detection, mapping, and collection.
 Live underwater view of litter picking on board the Zrinski boat
Live underwater view of litter picking on board the Zrinski boat
Finally, the day after the demonstration, on the 13th of October, the final SeaClear conference took place at the University of Dubrovnik. The event, titled: “SeaClear: Smart Robots and Human Hearts—for Clean Oceans” welcomed press, local authorities, researchers, and students, to disseminate the results of the SeaClear project. The work package leaders shared their experiences with automatic litter collection from the ocean floor, and lessons learned during this project.
 Discussion during the final SeaClear conference
Discussion during the final SeaClear conference
Overall, this demonstration has been seen as a positive step towards cleaning up the ocean floor both by the reviewers but also the media community that participated in the tests. Of course, the results of this project will not go unused: we are already working full speed on the continuation of this project in SeaClear 2.0, where we are planning to address the full life-cycle of litter collection, and improve upon the litter collection capabilities. If you would like to continue receiving news on the progress of cleaning up our ocean's floor, please subscribe to the SeaClear 2.0 newsletter.