AI and Robots Revolutionize Marine Litter Collection with SeaClear Project
European researchers created a functional team of smart robots designed to clean litter from the seafloor. The SeaClear system, created within a four-year European research project which ended in December 2023, has successfully passed a series of tests in both clear and murky waters.
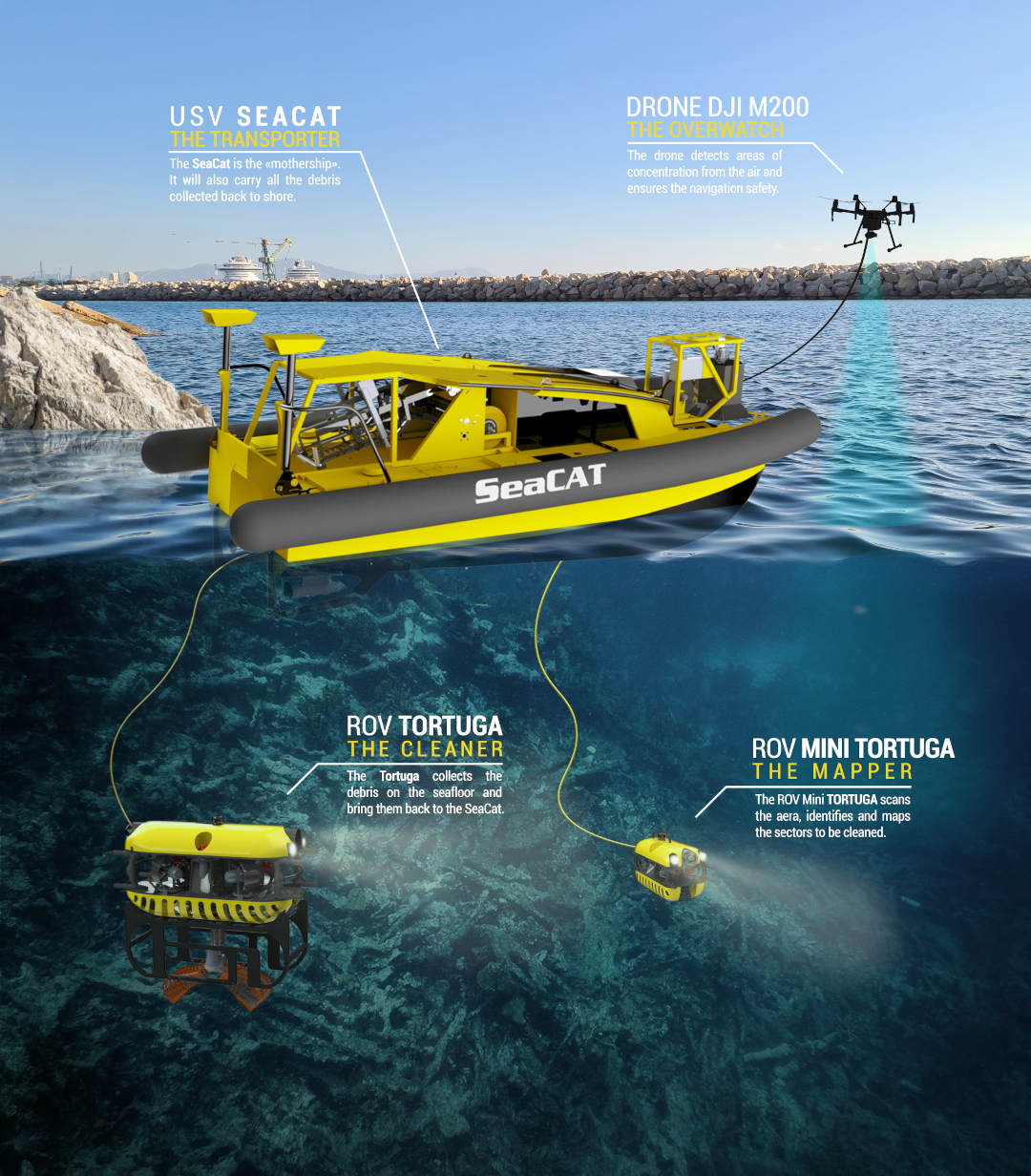
The SeaClear system is composed of several interconnected components. The base vessel, SeaCAT, acts as the central unit, deploying and managing two underwater remotely operated vehicles (ROVs): the Mini Tortuga for exploration and the larger, Tortuga ROV, for litter collection. The litter is deposited in a special basket. Additionally, an aerial drone monitors and maps the sea surface, assisting in the identification of litter hotspots. These elements work in concert to create a map of the ocean floor, detect litter, and subsequently collect and remove it efficiently.
In its current stage, the SeaClear system can lift up to 7 kg, the gripper can fit the volume of two 2L soda bottles, and the robots collect litter in waters up to tens of meters deep. When improved for commercial operation, the system will work with a 70% smaller cost than divers.
The research was funded by a Horizon 2020 project led by TU Delft in the Netherlands, concluding in December 2023. "By the project’s end, we had a fully operational system demonstrating its functionality," said the project lead. This groundbreaking innovation showcases the potential of autonomous robotics to address the pressing issue of ocean litter.
The issue at the heart of the SeaClear project is the escalating crisis of ocean litter, a problem that poses a severe threat to marine ecosystems, wildlife, and human health. Oceans are currently burdened with an estimated 26 to 66 million tons of waste, predominantly consisting of plastic. "When we look at the sea surface, we only see a beautiful blue area. But once you get under the surface, you see the ugly reality", says Iva Pozniak from the Regional Development Agency Dubrovnik-Neretva County in Croatia. More than 90% of the waste is not visible but rather lies at the bottom of the sea.
This waste not only degrades the beauty of marine landscapes, but it also destroys habitats, entangles and poisons marine life, and disrupts entire underwater ecosystems. Microplastics, which are produced by the breakdown of larger plastic items, enter the food chain and pose health risks to both marine life and humans. The problem is made worse by the fact that a large amount of this litter ends up on the seafloor, where it is difficult to find and remove. SeaClear's mission is to combat this underwater litter problem using innovative, autonomous robotic technology, aiming to clean our oceans and protect their biodiversity.
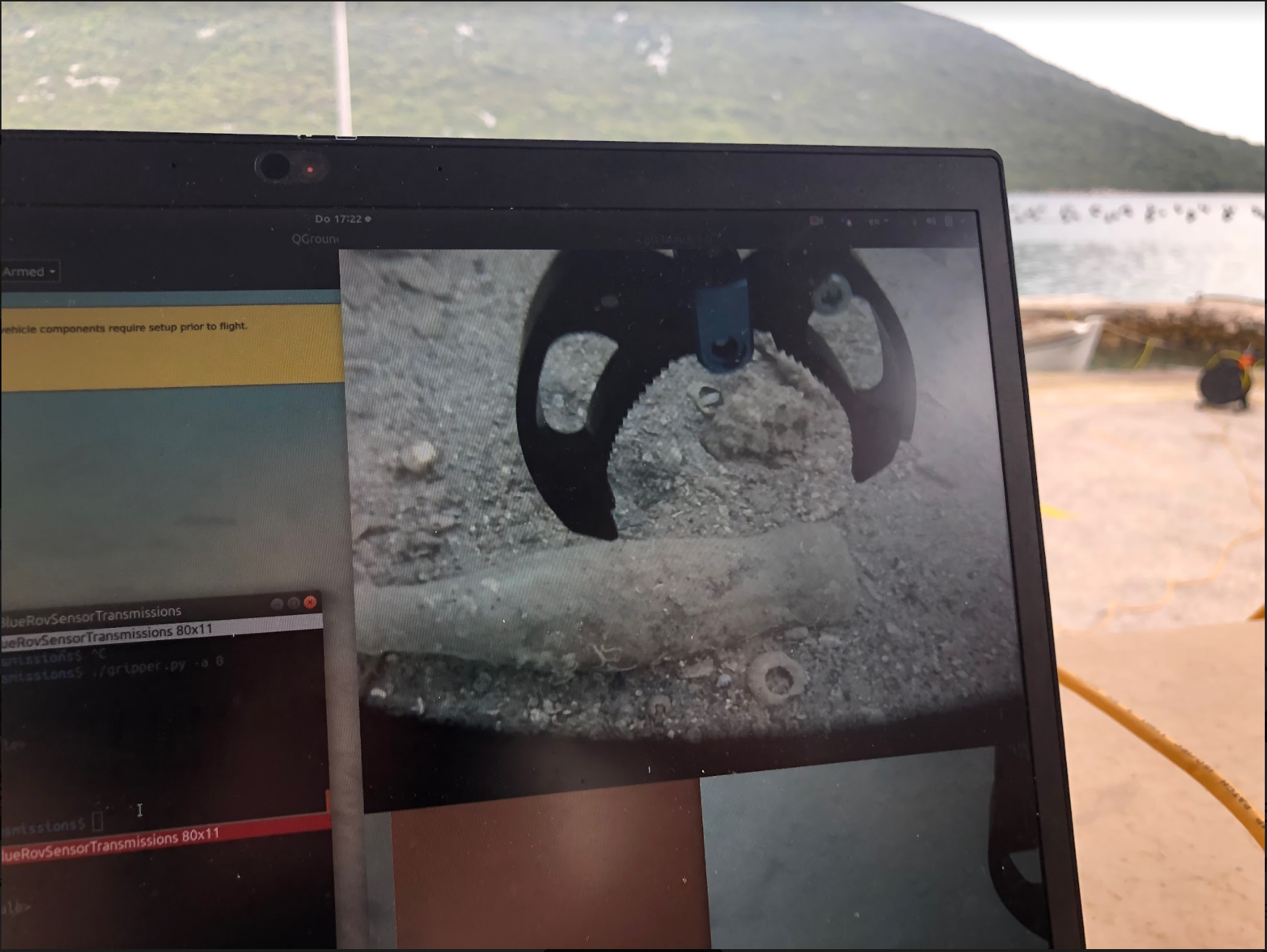
"Nothing in nature helps clean the oceans. We must innovate solutions ourselves," says Stefan Sonowski of TU Munchen in Germany. While a solution does not yet exist in nature, he and his colleagues did draw inspiration from nature, particularly in designing the gripper's honeycomb structure, which is lightweight yet sturdy and allows small marine creatures to escape while retaining litter.
One of the key features of the SeaClear system is its adaptability to different conditions, including varied water properties and different kinds of litter. “Unfortunately, litter is everywhere, but different kinds of litter occur in different places," explains Cosmin Delea from Fraunhofer CML, Germany. For example, Hamburg Port, one of the test sites of SeaClear, had heavier industrial waste, while in the tourist areas of Croatia there is lighter, more diverse waste such as plastic bottles and bags.
Artificial intelligence (AI) is pivotal to SeaClear’s functionality. AI algorithms accurately detect and identify litter, and have been trained to differentiate it from marine life. Integrating machine learning and computer vision lets the underwater robots navigate underwater environments and make decisions.
The newly emerged large-language models like ChatGPT might help further with high-level planning: determining the optimal actions for the system. However, difficult challenges in robotic automation still remain at the lower level. “Imagine asking a robot to bring you a beer from the fridge," explains professor Lucian Bușoniu from the Technical University of Cluj-Napoca, Romania. “How to orient the gripper, grip the bottle, apply the right forces — this interface between robot and the real world is where things get messy.” For such tasks in SeaClear, solutions will continue to involve engineering and testing.
Machine learning also helps guide components to prevent cable tangling. Some components connect to the SeaCat mothership via cables, enabling them to operate underwater for hours. “We developed an algorithm controlling cable slack,” says Ivana Palunko of the University of Dubrovnik, stressing that “Cable management is very important underwater.”
As SeaClear might become a feasible solution for cleaning the ocean bed, the team must also consider the cross-cutting legal implications and impact on other actors involved in maritime business. “SeaClear is technically autonomous and can do the job by itself, but in reality we need to consider commercial and recreational shipping, kayaks, industrial ships, and divers that are also in the water," warns Claudia Hertel-Ten Eikelder from the Hamburg Port Authority, where several tests have taken place.
With proof-of-concept experiments demonstrated, SeaClear could now be used commercially, says Yves Chardard of SeaClear’s French partner SubSea Tech. This solution could be attractive to entities such as ports, tourist sites, environmental institutions, and other civil and military institutions.
For the development of the SeaClear system, in the subsequent project SeaClear 2.0, “we need to go faster, heavier, and deeper," says Chardard. “With SeaClear 1.0, we are picking up plastic bottles, shoes and other similar waste. With SeaClear 2.0, we want to pick up tires, washing machines, and in general heavier things. It’s much more difficult to lift 250 kilos from the seabed, so we want to focus on that.”
Building on SeaClear’s success, the team has secured 9 million euros in Horizon Europe funding and cofunding for SeaClear 2.0, to build a more robust system for surface and deep Mediterranean litter. In addition to robotics, this followup project also focuses on community engagement and policy, with activities like gamified apps and educational programs to curb litter production. With demonstrations planned across the Mediterranean, the project’s diverse 13-partner, 9-country consortium combines public engagement, AI, marine technology and recycling expertise, enabling a comprehensive approach to conservation. The SeaClear2.0 project started in January 2023 and is a part of the EU Mission "Restore our Ocean and Waters”; follow our social media at https://linktr.ee/seaclear2.0 to find out more.
Videos:
- Final demonstration in Dubrovnik
- SeaClear Demonstration in Hamburg:
- Concept video for follow-up project SeaClear2.0:
Romanian version of the press release
German version of the press release