In order to collect common consumer-scale litter items from the sea floor, a specialized gripper is required to account for the various types of objects that are found underwater. Accordingly, we have improved the initial prototype of the SeaClear gripper by adding key features that enhance the gripper’s durability, grasping capabilities, and adaptation to difficult litter items.
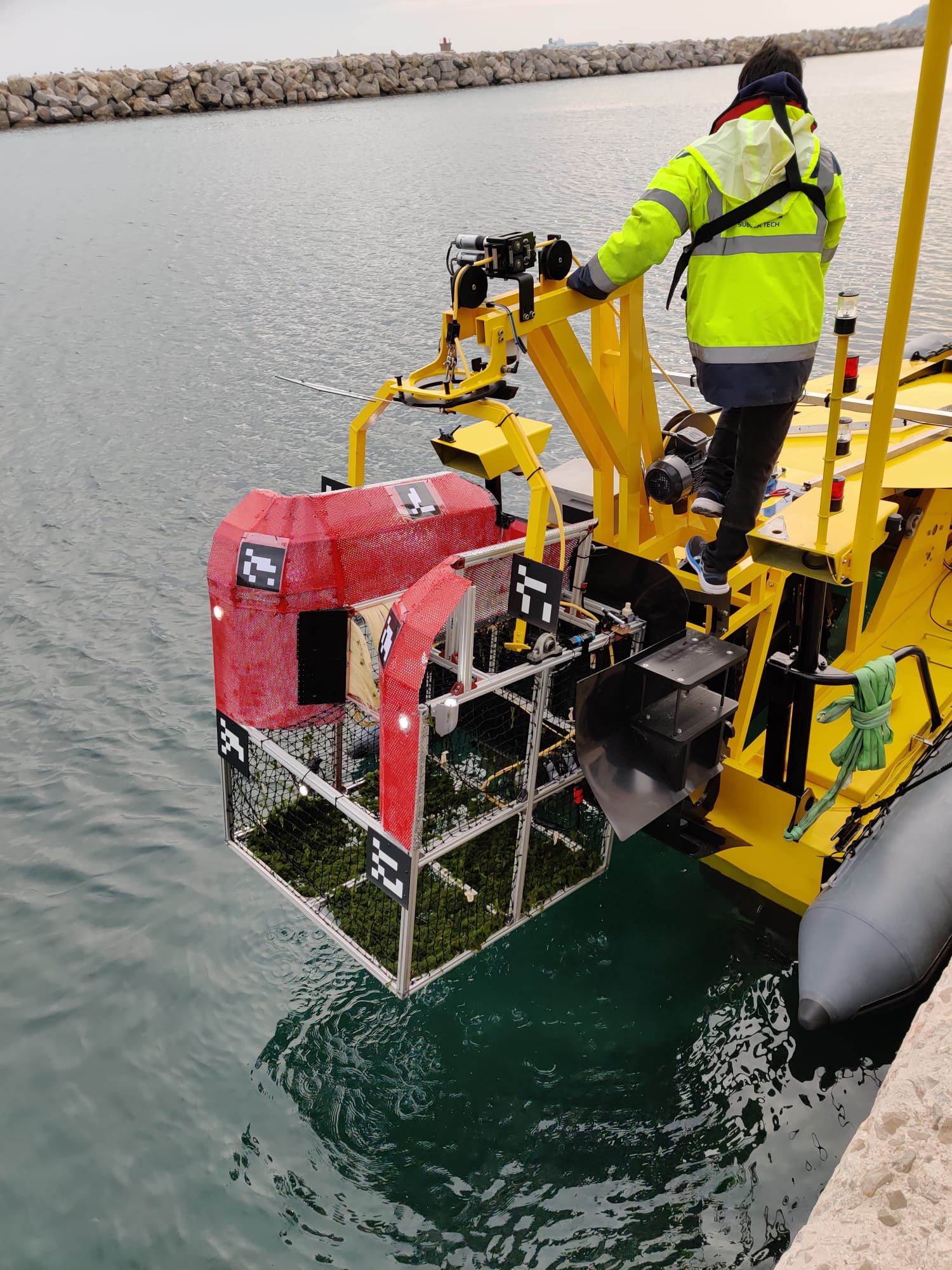
The collection ROV with mounted gripper in the fully-open launch configuration
One major challenge with the gripper design is achieving large opening angles to grasp bigger objects and while still allowing proper integration with the LARS from the SeaCat. With our newly developed mechanism, we can translate the gripper motor’s torque to a grasping force over the full opening range and are now able to robustly deal with a wide variety of litter items.
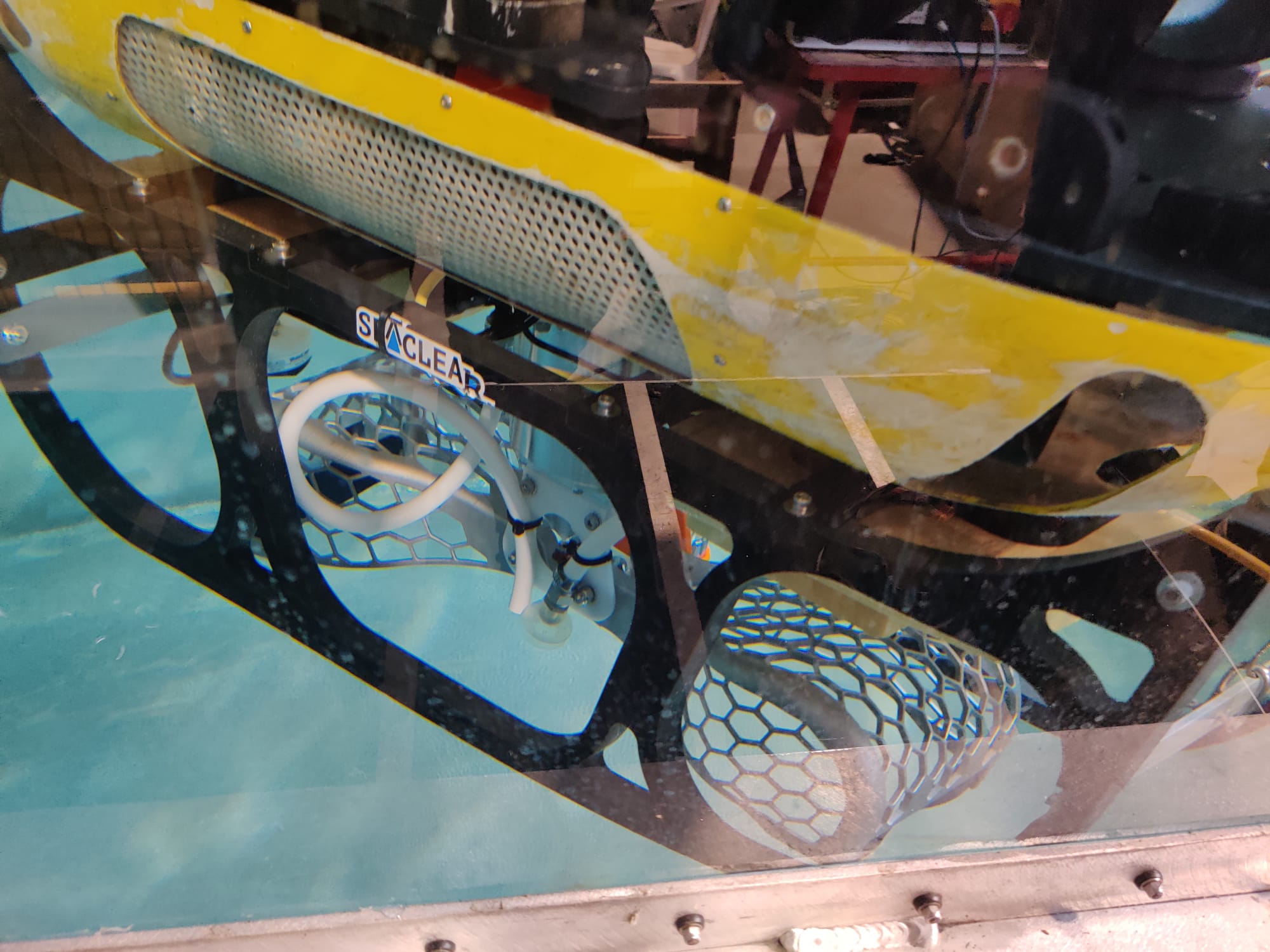
Grasping of a drinking can in a lab tank
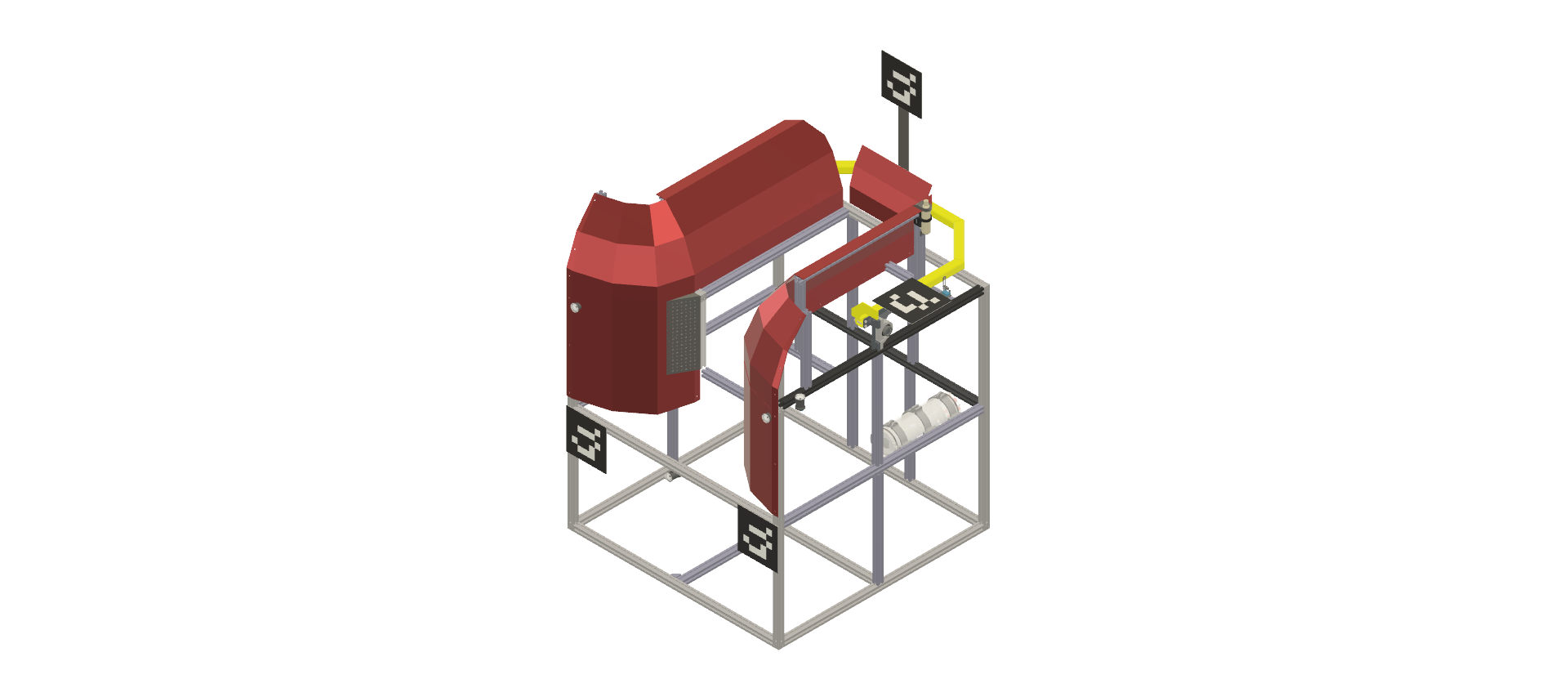
A second addition to the original design is a suction device that can pick up structureless objects such as plastic bags. These items are challenging to grasp with regular grippers, therefore an alternative is necessary. A small pump is activated to create the suction force, and a second pump is used to release the collected items and blow litter into the collection basket.
Grasping of a plastic bag in a lab tank
After promising grasping test in a controlled lab environment, the new gripper was deployed during the first public demonstration of the SeaClear system in Hamburg. There, we managed to successfully pick up a number of litter items, including bottles, cans, and plastic tubes. With this achievement, we are optimistically looking forward to the second public demonstration in Croatia later this year.
Grasping of plastic bottle and metal can during public Hamburg demonstration
As the SeaClear project progresses, Fraunhofer CML has been busy with the design and development of the collection basket for the autonomous system. The basket is designated to aggregate collected litter and ensure a safe transport out of the water and later on to shore, at the end of each mission. A modular prototype was built that allows for experiments with different wall materials, ROV-to-Basket docking areas, and Gripper-to-Basket interfaces.
On the 15th and 16th of September 2021, the first tests of the SeaClear robots took place in the Dubrovnik area, Croatia. This was the first time representatives from all the partners met live after the kick-off meeting of the project, due to the on-going pandemic due to CoVID-19.
As we are approaching the final trials for the SEACLEAR system, our team has gathered once again in Marseille from 27 of February until the 3rd of March for further tests. Updated versions of the components were tested alone and in combination with each other, to discover improvement points.
An updated version of the basket was brought on site, featuring AR tags for easier localisation from the Tortuga, fiber brisstles for easier deposit of litter without possibility of escape, and a funnel shaped entry for easier entrance of the Tortuga with the gripper. The new basket was also tested in tandem with its LARS module (Launch And Recovery System) that was developed for the SeaCAT.
Furthermore, the Tortuga was equipped with a refined version of the gripper, which was 3D printed in aluminium to optimize for weight and resistance. Several tests demonstrated that the new gripper can handle litter of different shapes and dimensions, and is ready for deployment for the final demonstrations. Finally, we also managed for the first time to perform real-time localisation of the tortuga using the drone that was flying above.
We are now on the final stretch before our much anticipated demonstrations on Hamburg this June. Stay tuned for updates and details about the project results!
After evaluating a first functional prototype, the SeaClear gripper goes into manufacturing to produce a rugged, waterproof version for our trials. This device is designed and implemented by our partners at TUM. This version is decidedly simple for robust operation under harsh conditions and will provide a baseline for comparing its efficiency to upgrades with suction capabilities and other advanced features.
One of the key components of the SeaClear system is the collection basket. It is more efficient if the underwater robots deposit what they collect someplace underwater, and then transfer everything to the shore. The collection basket was developed since the very early moments of the SeaClear project, however constant improvements have been made.
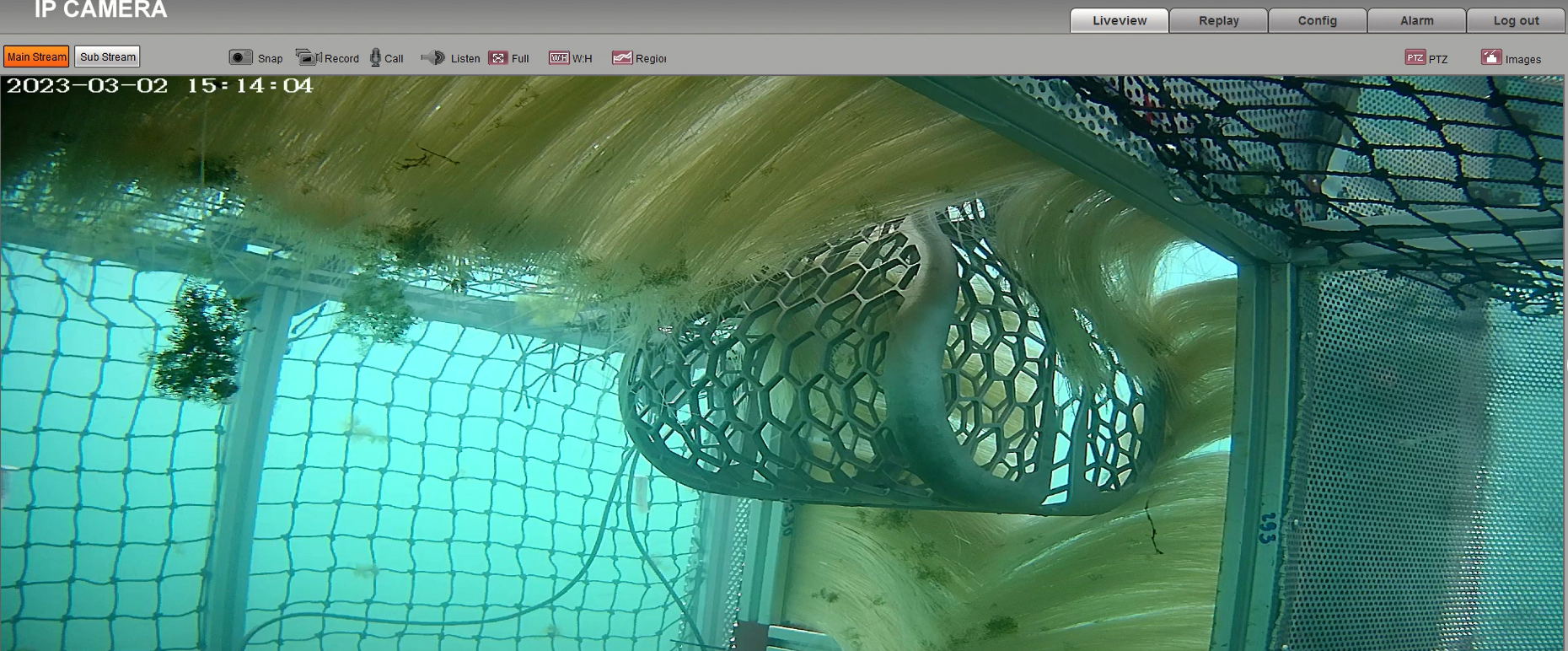
The latest version of the robot has made it even easier for the collection ROV to deposit the litter. Several AR tags have been added in key locations of the basket, so that the robots can identify its position with great accuracy. This is important so that the robots can know, at all times, where to drop the litter. Furthermore, funnel shaped entrances on the side and the top of the basket, allow for an easier entry of the tortuga.
The basket is also equipped with a camera, for easier verification of litter dropoff during the development stages of the project. As it is seen on the image above, the entry points are now equiped with organic bristles that allow the gripper to enter, without letting the litter escape the encasement of the basket.
Finally, the top part of the basket was painted in a high contrast colour, so that it is visible from air. This is important in clear water conditions, as the drone of the SeaClear system can help locate the basket, and transmit this information to all the robots of the system. This improved interface was tested during the latest campaign in Marseille and yielded great results. This was also the first time we attached the basket to the back of the SeaCAT, and we tested the Launch And Recovery System (LARS) for the basket.
As we are getting ready for the first demonstration of the SeaClear system in June, we are working on some further minor updates. This is mainly focused on the LARS system so that we can control better the deployment of the basket and ensure a safe approach of the ROVs. As always, stay tuned for updates!
The team at TUM - ITR has developed a prototype of the gripper device for SeaClear. This version is decidedly simple for robust operation under harsh conditions and will provide a baseline for comparing its efficiency to upgrades with suction capabilities and other advanced features. In this video a KUKA iiwa robot is used to simulate the motion of the underwater vehicle the skid and gripper will be attached to. The versatility and robustness of the gripper design is shown by collecting various objects of different shapes and material, from stiff but deformed cans to flexible nets or piles of objects.
13-07-2023 update: You can read about our new and improved gripper design in a separate news item.
As part of the SEACLEAR project, Subsea Tech successfully carried out sea trials to test the deployment of the Tortuga ROV from the SeaCAT USV using its newly developed LARS (Launch And Recovery System)
The test took place at the Port de l'Estaque in Marseille. It takes about 30 seconds for each phase deployment and recovery. At the time we can deploy one robots as we have only one LARS fitted on the USV, but multiple units can be fitted on the SeaCAT so that we can deploy the whole range of robots needed for the final SEACLEAR system. We are also happy to see the SeaCAT wearing its new colours.
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 871295.
The SEACLEAR project spans four years, running from January 1st, 2020 to December 31st, 2023.
SEACLEAR NEWSLETTER
Stay up to date with news about the project. Expected frequency for the newsletter is twice a year.
SEACLEAR is not responsible for the content of third-party sites to which we link from this site.
 The collection ROV with mounted gripper in the fully-open launch configuration
The collection ROV with mounted gripper in the fully-open launch configuration Grasping of a drinking can in a lab tank
Grasping of a drinking can in a lab tank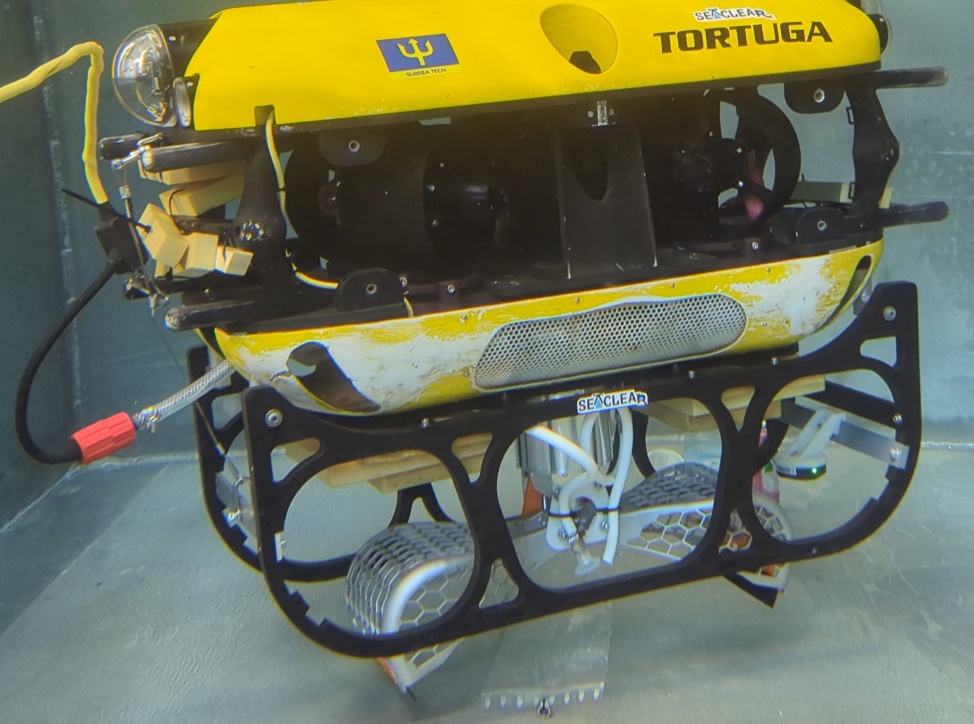 Grasping of a plastic bag in a lab tank
Grasping of a plastic bag in a lab tank Grasping of plastic bottle and metal can during public Hamburg demonstration
Grasping of plastic bottle and metal can during public Hamburg demonstration