
As the SeaClear project progresses, Fraunhofer CML has been busy with the design and development of the collection basket for the autonomous system. The basket is designated to aggregate collected litter and ensure a safe transport out of the water and later on to shore, at the end of each mission. A modular prototype was built that allows for experiments with different wall materials, ROV-to-Basket docking areas, and Gripper-to-Basket interfaces.
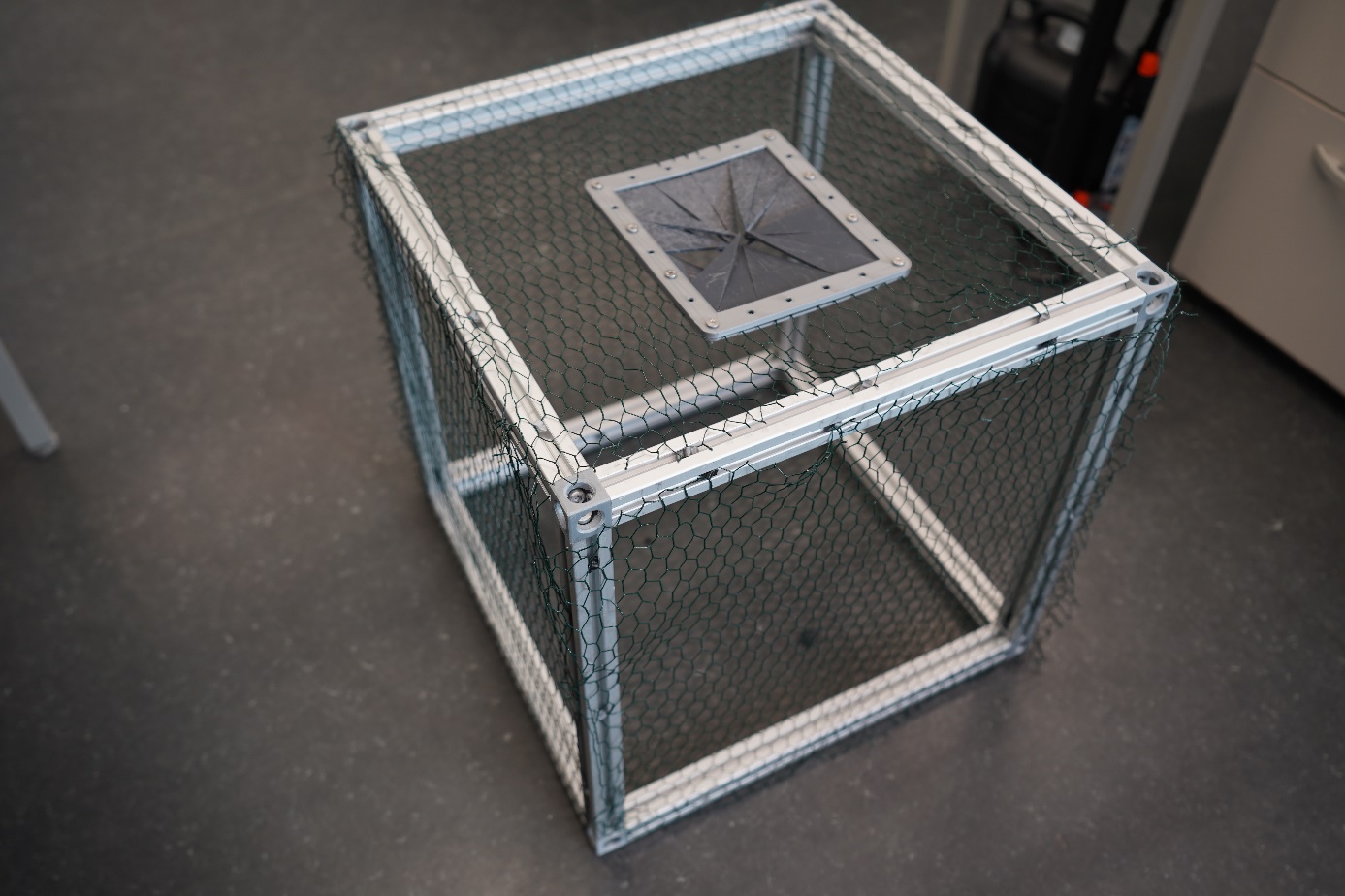
Tests were performed with the prototype basket being submerged in a water channel, simulating the existing physical conditions and interactions between the litter and water currents. Among other experiments performed, exemplary pieces of litter consisting of glass jars, aluminum cans, and plastic bottles were placed inside the gripper and deposited into the basket through varying interfaces. The gripper is also on the development phase, and a preliminary design was provided by SeaClear partner TU Munich. The goal is to establish an ideal Gripper-to-Basket interface that allows for a successful transfer of litter and thus, collection while prohibiting it from leaving the basket again once collected.
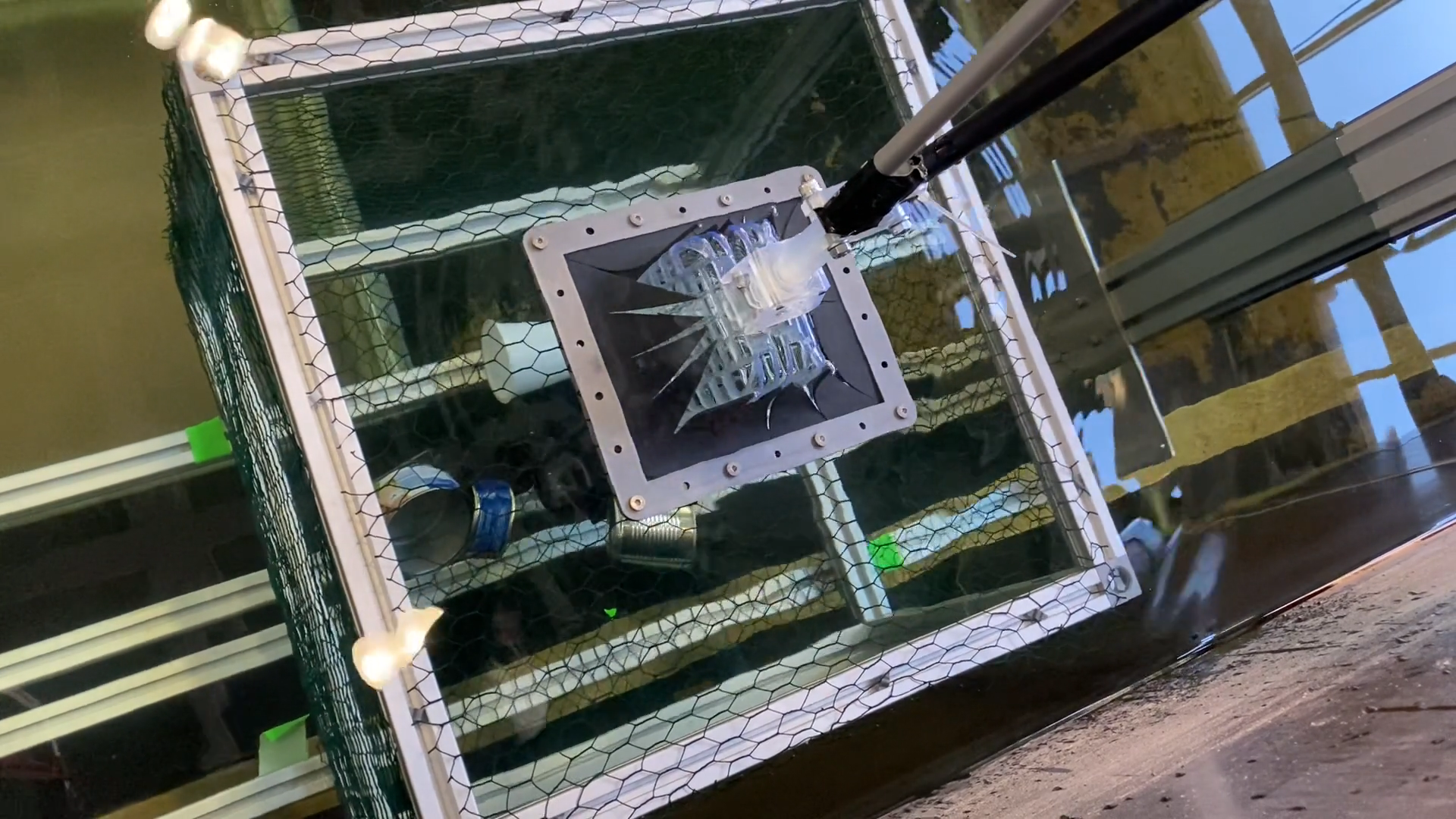
Below you can see a demonstration of the initial tests, and how well did the gripper perform under the different designs of the basket

This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 871295.
The SEACLEAR project spans four years, running from January 1st, 2020 to December 31st, 2023.