On the 15th and 16th of September 2021, the first tests of the SeaClear robots took place in the Dubrovnik area, Croatia. This was the first time representatives from all the partners met live after the kick-off meeting of the project, due to the on-going pandemic due to CoVID-19.
The first round of public demonstrations of the SEACLEAR system took place in Hamburg Port on the 8th of June 2023. This was the first time that the public, through media outlets and stakeholders, had the opportunity to interact with the SEACLEAR system, try different scenarios, and discover the potential and possibilities for autonomous litter detection and collection.
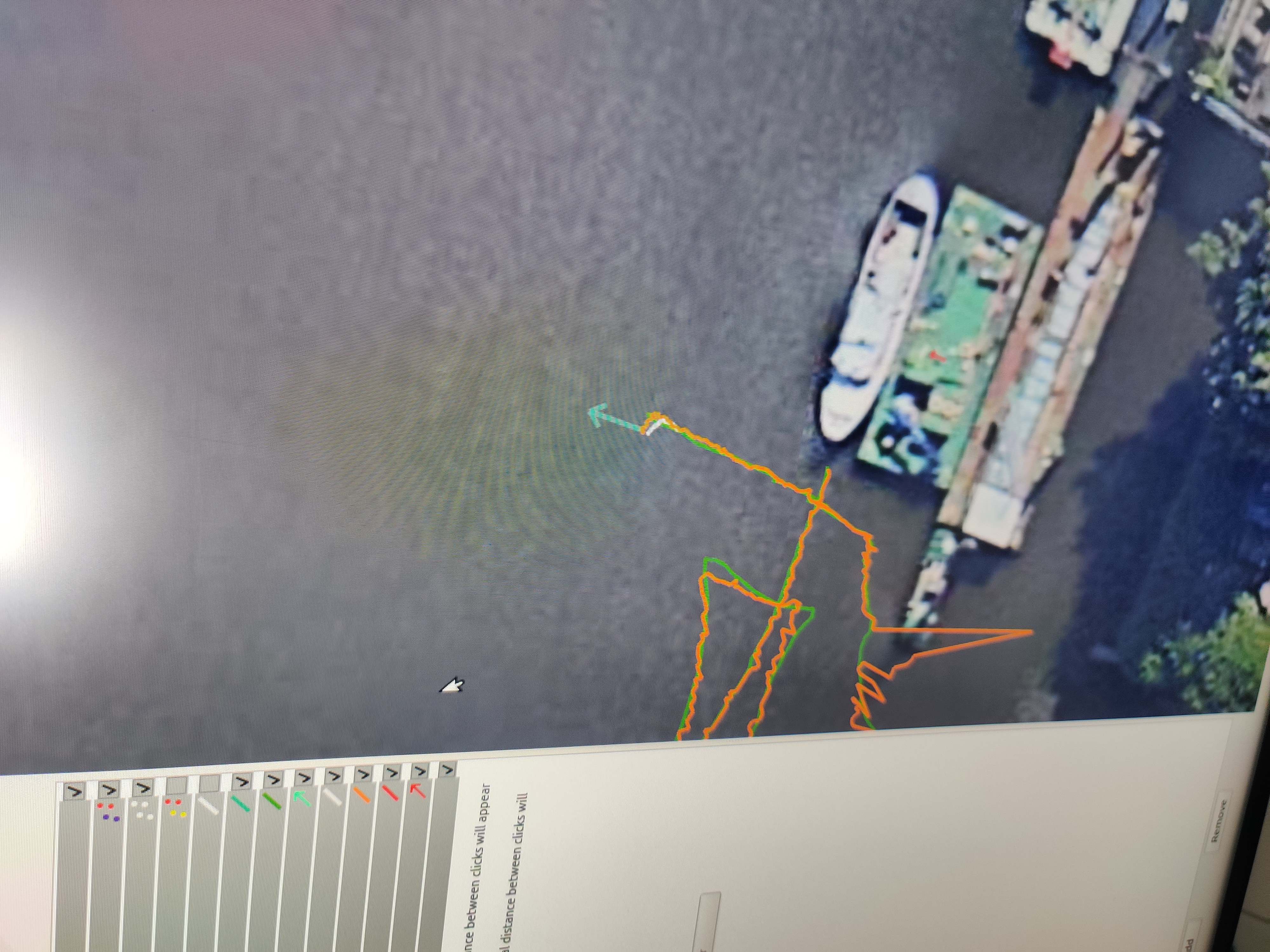 Calculated versus measured position of the observational ROV
Calculated versus measured position of the observational ROV
Prior to the demonstration, the SEACLEAR team did final tests and fine-tuning on various components of the system. The autonomous navigation of the SeaCAT and ROVs was tested in both lawnmower patterns and navigation with waypoints. This is crucial for creating the bathymetry map of the area, for detecting litter, and later on collecting it without the need for human intervention.
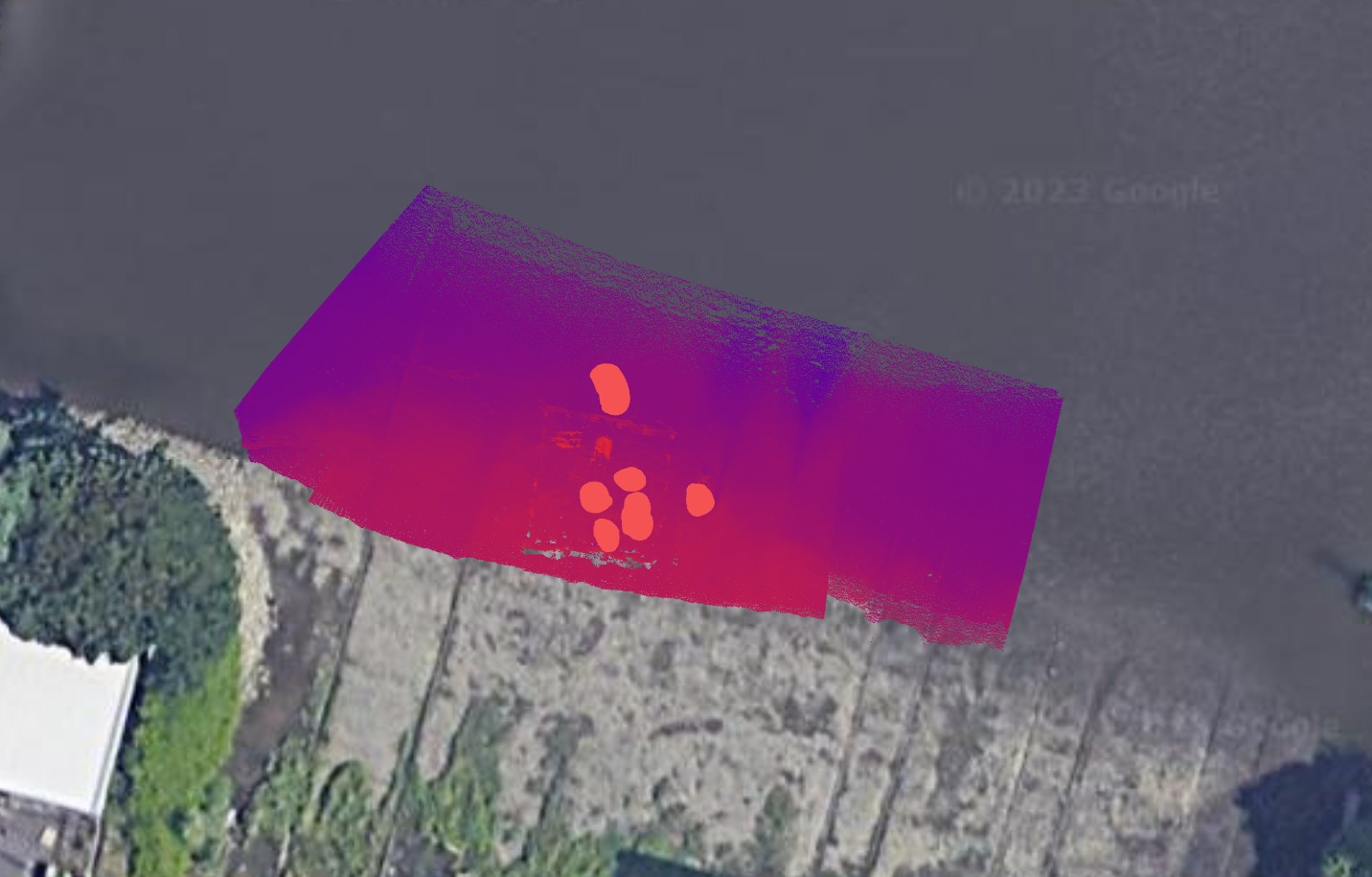 Litter map projected on a satelite image. The light orange areas are locations of the litter
Litter map projected on a satelite image. The light orange areas are locations of the litter
The litter placed by our team at the beginning of the trials, was later 'discovered' by the observation ROV, and the discovered coordinates of the litter were compared against observations made from the air using the drone of the system. The accuracy of the detection has improved significantly since our last trials, due to upgrades in the sensory system of the underwater ROVs.
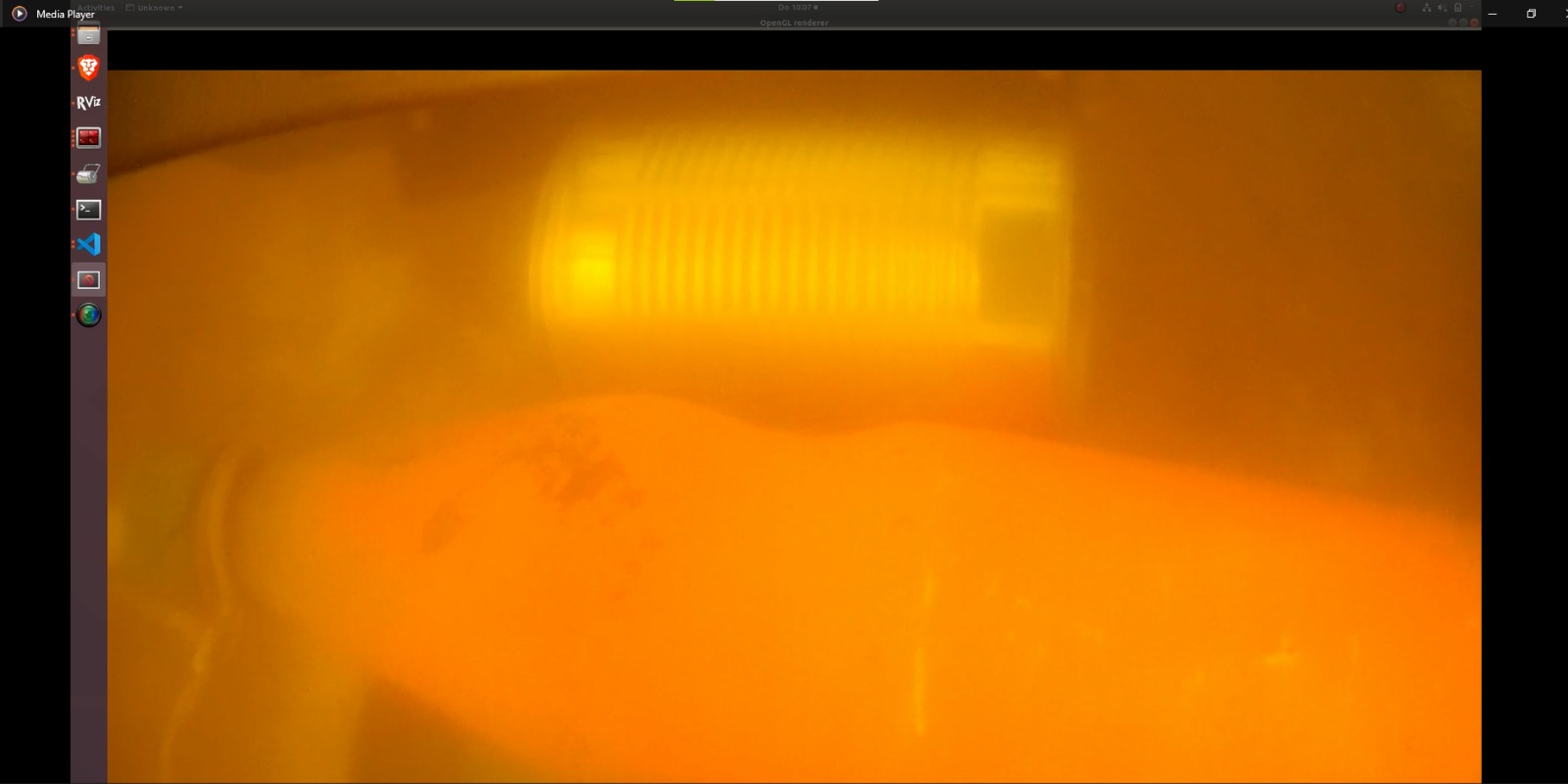 View from the gripper camera. A bottle and a can are captured and are visible
View from the gripper camera. A bottle and a can are captured and are visible
The system not only detected the location of the litter, but was also able to pick it up for transfer to the storage basket. During the demonstration, we were able to successfully pick almost all the litter placed by our team.
 Media interviewing SEACLEAR team members
Media interviewing SEACLEAR team members
The trials and the public demonstration was covered by ZDF, one of the biggest German public-service television broadcasters. The footage that was captured will be featured in 'Plan B', a show about alternatives to some of humanity's biggest problems. Furthermore, several stakeholders from the port of Hamburg visited the demostration, including the Harbor Masters, representatives from (amongst others) the Environmental, Port Strategy, and Hydrographics departments. This was important so that we get relevant feedback and ideas about the operation of the SeaClear system.
As we are approaching the final trials for the SEACLEAR system, our team has gathered once again in Marseille from 27 of February until the 3rd of March for further tests. Updated versions of the components were tested alone and in combination with each other, to discover improvement points.
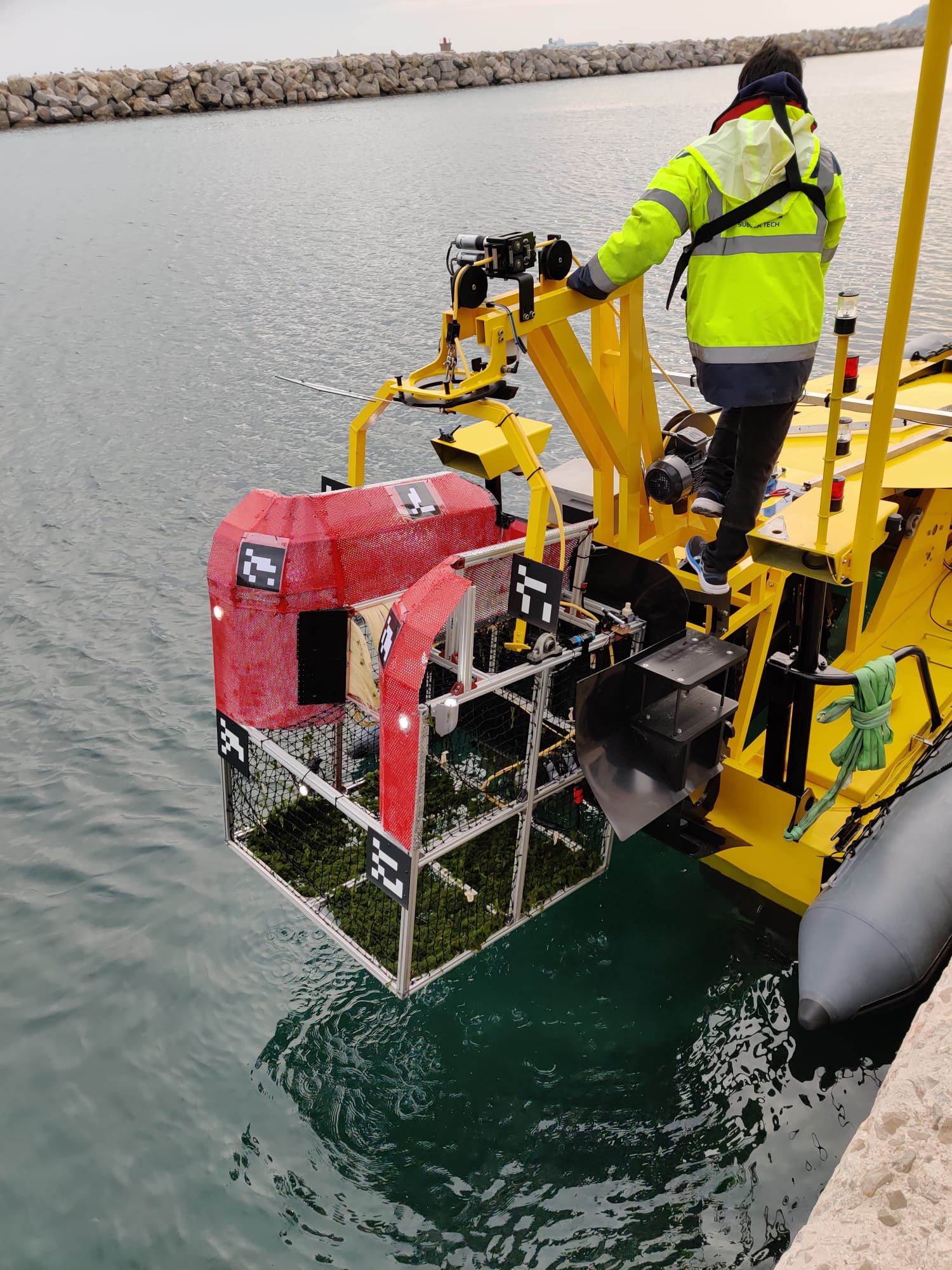
An updated version of the basket was brought on site, featuring AR tags for easier localisation from the Tortuga, fiber brisstles for easier deposit of litter without possibility of escape, and a funnel shaped entry for easier entrance of the Tortuga with the gripper. The new basket was also tested in tandem with its LARS module (Launch And Recovery System) that was developed for the SeaCAT.
Furthermore, the Tortuga was equipped with a refined version of the gripper, which was 3D printed in aluminium to optimize for weight and resistance. Several tests demonstrated that the new gripper can handle litter of different shapes and dimensions, and is ready for deployment for the final demonstrations. Finally, we also managed for the first time to perform real-time localisation of the tortuga using the drone that was flying above.
We are now on the final stretch before our much anticipated demonstrations on Hamburg this June. Stay tuned for updates and details about the project results!
On June 16th and 17th 2020, SeaClear partners participated in a project meeting which was held online due to the situation with the corona virus. SeaClear initiative plans to develop first mixed system of Unmanned Underwater, Surface, and Aerial Vehicles - UUV, USV, UAV - to find and collect litter from the seabed and from the water column. The focus is on coastal areas since that is where waste inflow concentrates. At this meeting, coordinators of each work package provided an overview of the current state of implementation and instructed further tasks in order to comply with the planned schedule of activities. The next meeting is foreseen for September 2020 and should take place in Dubrovnik. Preliminary investigations of the pilot sites in Croatia, namely the island of Lokrum and Bistrina in Mali Ston Bay, has already begun by experts from the University of Dubrovnik. Planned meeting in September will be a great opportunity for other expert partners to also conduct initial demonstrations of currently available systems.
The second round of trials of the SEACLEAR system took place in the port of Hamburg between 10 and 12 of May 2022. The port of Hamburg is the second test site of the project, offering completely different conditions and challenges compared to the first test site in Dubrovnik, Croatia. Underwater visibility is considerably lower, often lower than a few centimetres, while there is heavy traffic present from commercial ships. This makes the use of vision cameras for detecting the litter unusable, with the only reliable detection alternative being sonar sensors.
During these trials we included the latest developed components of the SEACLEAR system, such as the LARS for the underwater robots, a more sturdy version of the gripping system, and the final version of the collection basket. You can get a feeling of these trials from our video and pictures below.

The event created a significant interest in the local media, and several news outlets visited the test sites to cover and report on our progress. Following the tests and media appearances, we discussed the current progress and future steps until the next meeting in Marseille, in September 2022.

From 12th to 16th of September 2022, the SEACLEAR team gathered at the SubSea Tech headquarters in Marseille for another round of trials and tests. During this meeting, we tested the upgraded components of the system and their interaction. More specifically, a new version of the collection basket was tested with the Tortuga collection UUV, the pose estimation of the mini Tortuga observation UUV was validated online with real data, and we further tested the capabilities of the AUV for detecting litter and the UUVs.
 The collection UUV deploying litter inside the basket
The collection UUV deploying litter inside the basket
The meeting was a great opportunity to update all the partners on the progress, and discover what are the elements that need to be fine-tuned before the final trials next year. The meeting was also covered by media appearances both in the local and european level.
 Tortuga collection UUV with the latest version of the underwater gripper
Tortuga collection UUV with the latest version of the underwater gripper

This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 871295.
The SEACLEAR project spans four years, running from January 1st, 2020 to December 31st, 2023.
Design & maintenance by Lichtbringer