
Following up the news of SeaCat acquisition by Subsea Tech, we are proud to announce that SubSea Tech has completed the first trials of SeaCat in the sea. In the video below you see the deployment of the vessel in the port of Marseille and how it is able to navigate autonomously in the area.
Development
The SeaCAT USV has been designed and developed for unmanned inspections of offshore infrastructures such as marine renewables and O&G assets. The main paradigm that led to the development of SeaCAT was the need to provide a cost effective and low CO2 emission solution able to carry out tasks that were traditionally done from large vessels, implying high fuel consumption and high personal costs. To tackle these issues, Subsea Tech received back in 2016 a grant from the French Environment and Energy Agency ADEME to develop a first prototype of the SeaCAT. The concept is based on a catamaran hull capable to carry an important payload, including unmanned underwater vehicles (ROV) and unmanned aerial vehicle (UAV), in order to carry out inspection and monitoring missions under and above water. In addition to being unmanned, the advantages of the concept are low mobilisation and operational costs, operational flexibility and time saving, limited damage risk for targeted infrastructures and reduced environmental impact compared to traditional spreads. The complete system fits inside a standard 20’ container to ease mob/demob operations and optimize related logistics costs.
Technical Specifications
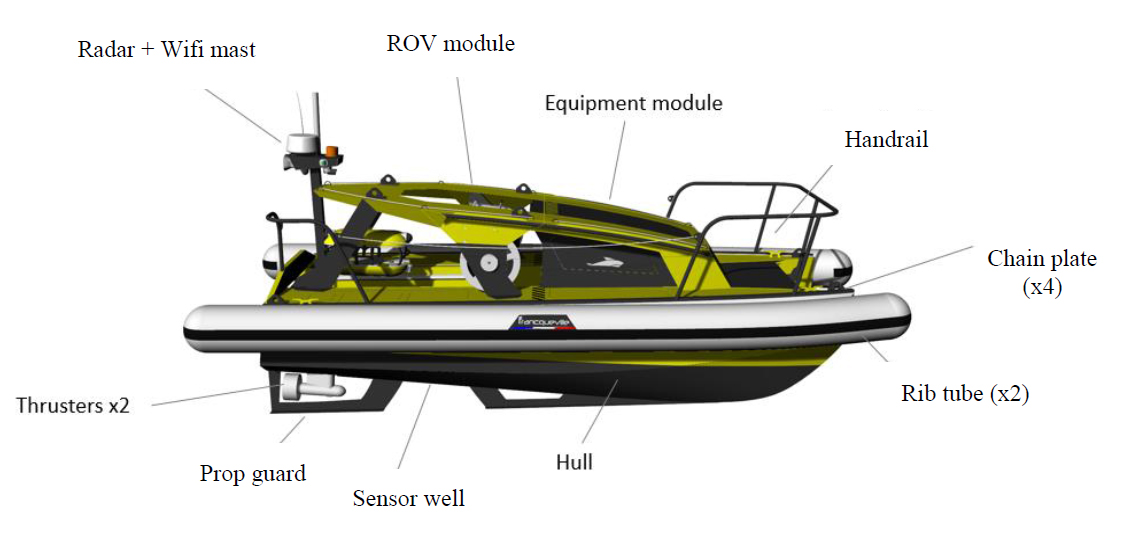
SeaCAT hull is 5.8m long and 2.15m wide and is fitted with lateral rib tubes. Once tubes are inflated, the USV have larger dimensions (6.83m length and 3.10m width) which ensures stability in harsh conditions (up to sea state 34 for operations and sea state 5 for transfers). The overall weight is just above 1,000 kg and the USV can embark up to 500kg additional payload, including inspection-class ROV, bathymetry sonars, side scan sonars, sub-bottom profiler, etc. An on-board diesel generator supplies the 2 powerful thrusters and the operating system as well as the sensors. In optimal conditions, SeaCAT autonomy can reach up to 7 days and 3 days at full speed (8 knots). The high speed and large broadband Wifi communication allows real-time control and live feedback from ROVs, cameras and sensors at control room level, with a range up to 5 km.
As for the SeaClear project, the SeaCAT is used a platform to launch 2 ROV - one for mapping the seabed and identify/classify the debris and the other one to collect the selected targets – and 1 UAV for mapping the debris in shallow water and clear water conditions.
First sea trials
The first sea trials of the SeaCAT were carried out in November 2020 in the harbour of l’Estaque (Marseille), next to Subsea Tech’s premises. These tests mainly focused on navigation capabilities of the USV and the sea trials demonstrated a very good stability of the twin hull USV, especially in choppy water. Next trials in the summer will include ROV deployment and hydrographic data acquisition.


This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 871295.
The SEACLEAR project spans four years, running from January 1st, 2020 to December 31st, 2023.