- D7.2 Web Presence
- D2.1 Use-Case Definition Document
- D1.1 Data Management Plan
- D3.1 Sensor Selection Report
- D7.1 Dissemination and Exploitation Strategy Plan
- D2.2 Specification and Design Document
- D2.3 Concept Cost-Effectiveness Report
- D3.2 Gripper and Suction Tool Design Report
- D3.3 Collection Basket Design Report
- D3.4 Sensors/platforms hardware integration technical guide
- D5.3 Technical End User Guide
- D7.3 Creation and Management of Stakeholder Community
- D6.1 Tourism-oriented demonstrator with assessment
- D6.2 Economy-oriented demonstrator (port cleaning) with assessment
- D7.4 Workshop reports
- D7.5 Dissemination and Exploitation report and business plan
The final public demonstration at Dubrovnik
The seaclear system public demonstration
First public demonstration at Hamburg
SeaClear animation
Second SEACLEAR trials at Hamburg
First SEACLEAR trials at Dubrovnik
Demonstration of the SeaCAT LARS system
SEACLEAR simulator: modes of operation
SEACLEAR test site Dubrovnik - Lokrum island
SEACLEAR test site Dubrovnik - Bistrina
Presentation of the SEACLEAR project during European Robotics Forum 2020
Initial footage taken with underwater cameras at the two SEACLEAR test sites.
- Poster about SeaClear defended by Cosmin Delea, from Fraunhofer CML, at the European Robotics Forum, in Malaga, Spain.
The SEACLEAR website use of software to analyse the number of visitors to its web pages and their behavior. This is based on your IP address (Internet Protocol address). The aim of this is to optimize, as far as possible, the information available and the way in which it is presented. The software does not analyse your identity and is used solely for the purpose outlined above.
SEACLEAR handles the data of the visitors to its website with care. Personal information will only be stored if this serves a reasonable interest. This information is stored securely. In this, SEACLEAR closely complies with the requirements of the Personal Data Protection Act (Wet Bescherming Persoonsgegevens).
The purpose of the SEACLEAR website is to inform visitors about the SEACLEAR Project, its research work and opportunities for collaboration. The website also serves as a publicity channel for news reports, press releases and events.
Information on the website
The information on this website is provided without obligation. This information has been compiled with the utmost care and efforts have been made to ensure this information remains up-to-date. Nevertheless, no rights may be derived from the information included on this website. SEACLEAR cannot be held liable for the accuracy, completeness, topicality or quality of the information published on its website.
Changes and/or updates
SEACLEAR reserves the right to make changes to the information offered on this website without advance notice.
Use of the website
SEACLEAR accepts no liability or responsibility for any damage or loss resulting from the use of the SEACLEAR website.
External hyperlinks
The SEACLEAR website contains a number of external hyperlinks, intended as an additional service for visitors to the website. SEACLEAR excludes all liability for any damage incurred by users of the SEACLEAR website as a result of visiting another website via an external hyperlink.
Links to the SEACLEAR website
External links to pages on the SEACLEAR website are permitted providing that they do not damage the good name of the organisation. There must be no suggestion that SEACLEAR project has authorised the use of a link if such is not the case.
The official English name of SEACLEAR is SEarch, identificAtion and Collection of marine Litter with Autonomous Robots.
Privacy Policy
The SEACLEAR website use of software to analyse the number of visitors to its web pages and their behavior. This is based on your IP address (Internet Protocol address). The aim of this is to optimize, as far as possible, the information available and the way in which it is presented. The software does not analyse your identity and is used solely for the purpose outlined above.
SEACLEAR handles the data of the visitors to its website with care. Personal information will only be stored if this serves a reasonable interest. This information is stored securely. In this, SEACLEAR closely complies with the requirements of the Personal Data Protection Act (Wet Bescherming Persoonsgegevens).
Cookies
On its website, SEACLEAR uses what are known as cookies, small files that are stored on your computer, tablet or smartphone. Cookies are used to identify you when you revisit the website and to enable access to specific parts of the SEACLEAR website.
Almost all internet browsers, such as Microsoft Internet Explorer, FireFox and Safari, offer users the option of accepting or refusing cookies.
Recording and securing data
SEACLEAR uses security procedures to prevent unauthorised access to the confidential information on the website such as data concerning user numbers and user behaviour.
Intellectual property
SEACLEAR makes every reasonable effort to enter into a written agreement with the legitimate owner of digital text and images on their use. However, this may be impossible in some cases, because one or more of the legitimate owners of the intellectual property or their heirs cannot be traced. If, in your opinion, any text or digital objects published by SEACLEAR on one of the SEACLEAR communication channels represent an infringement of your rights, you can contact This email address is being protected from spambots. You need JavaScript enabled to view it.. Your e-mail should contain the title of the relevant item, the communication channel and the materials involved. In such cases, SEACLEAR will amend or remove the materials, if no other agreement can be reached. A note to this effect will be included in the materials concerned.
This website has been developed for educational and social purposes and not for profit. For this reason, no payment will be made for materials submitted for publication or references on the website. SEACLEAR accepts no liability for the inappropriate use of this website or any damage that may arise as a result of its use.
Copyright
The texts and images on the SEACLEAR website may not be copied or changed or used in any other way, without written permission in advance. The intellectual property rights on the SEACLEAR website (including texts, design, photographs, videos and logos) rest solely with SEACLEAR. Of course, SEACLEAR also respects third-party copyright. If you believe that the information on the SEACLEAR website infringes your rights, please contact the SEACLEAR management group via This email address is being protected from spambots. You need JavaScript enabled to view it.
SEACLEAR Partners
Contact Us
SEACLEAR
Professor Bart De Schutter
SEACLEAR Project Coordinator
Delft University of Technology
Wendy Murtinu-van Schagen
SEACLEAR Project Officer
Delft University of Technology
Send us an email now
About SeaClear
We are building the first robots to clean the litter from the ocean floor!
What is SeaClear?
SeaClear — short for SEarch, identificAtion and Collection of marine Litter with Autonomous Robots — is a Horizon 2020 funded project that aims to solve, with the help of robots and artificial intelligence, one of the most important environmental problems: ocean litter.
How does the system work?
Today's oceans contain 26-66 million tons of waste, with approximately 94% located on the seafloor. The SeaClear project aims at automating the process of searching, identifying, and collecting marine litter, using a team of autonomous robots that work collaboratively.
To find more about each step of the procedure, click on the headers below
-
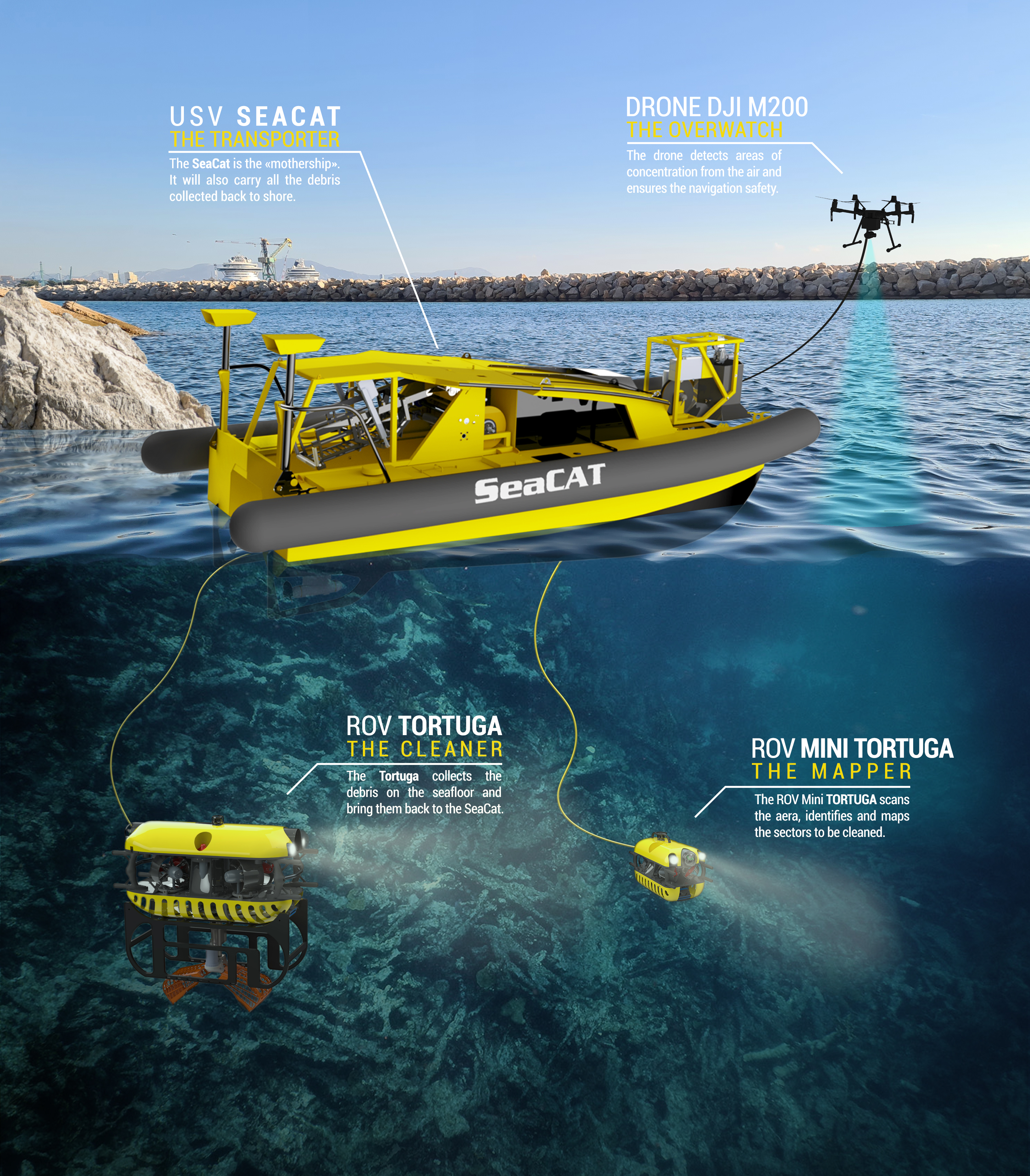
1. A surface vessel scans the sea bottom, marking any large debris that it finds
Our unmanned surface vehicle, the SeaCat from SubseaTech, scans the area of interest of the sea bottom using a multibeam echosounder, which produces a 3D bathymetry map of the bottom. This serves as a reference map to which all other information about litter will be added. Some large litter like tires or pipes may already be detectable from the bathymetry data, in which case this litter is already marked on the map.
The SeaCat also serves as the "mothership" of the system: all other robots deploy from and return to it. Robots communicate to the USV and get power from it via tethers. The computational resources required for sensing, control, and artificial-intelligence components are also hosted by the SeaCat.
-
2. In clear water, a drone searches for litter from the air
When the water is sufficiently transparent, an unmanned aerial vehicle (UAV or drone) searches for litter from the air. Larger litter pockets are expected to be identifiable in this way, and inform the more detailed search using the underwater robot in the next step. We are also investigating whether we can find correlations between surface and underwater litter pockets.
Our drone is a DJI Matrice M210 RTK, which we are modifying by adding a power and data tether to connect it with the surface vehicle.
In murky waters, the UAV still remains useful by scanning the surrounding area for obstacles.
-
3. An observation robot searches for litter underwater
A small unmanned underwater vehicle (UUV) is deployed from the USV and performs close-up targeted scans of the sea bottom to find smaller litter. To this end, it uses a camera and a forward-looking sonar, together with possibly other sensors such as metal detectors. Identified litter is placed on the reference map.
Litter is identitied with artificial intelligence, deep-learning object recognition techniques. These deep networks are trained so as to differentiate litter from sea-life and thereby ensure the system only collects what it should.
Our observation UUV is the miniTortuga from SubseaTech.
-
4. A second underwater robot collects the litter
A larger brother of the observation UUV, called the Tortuga, goes to each piece of litter on the map and grabs it with a gripper that is custom-made to interface with the Tortuga. This gripper is equipped with a suction device that will help with picking up litter in difficult circumstances, such as when it is lying among plants. Each piece of litter is reacquired with high accuracy and then picked up.
To plan the paths and control the motion of both the observation and collection UUVs, we exploit intelligent techniques such as reinforcement learning and data-driven control.
-
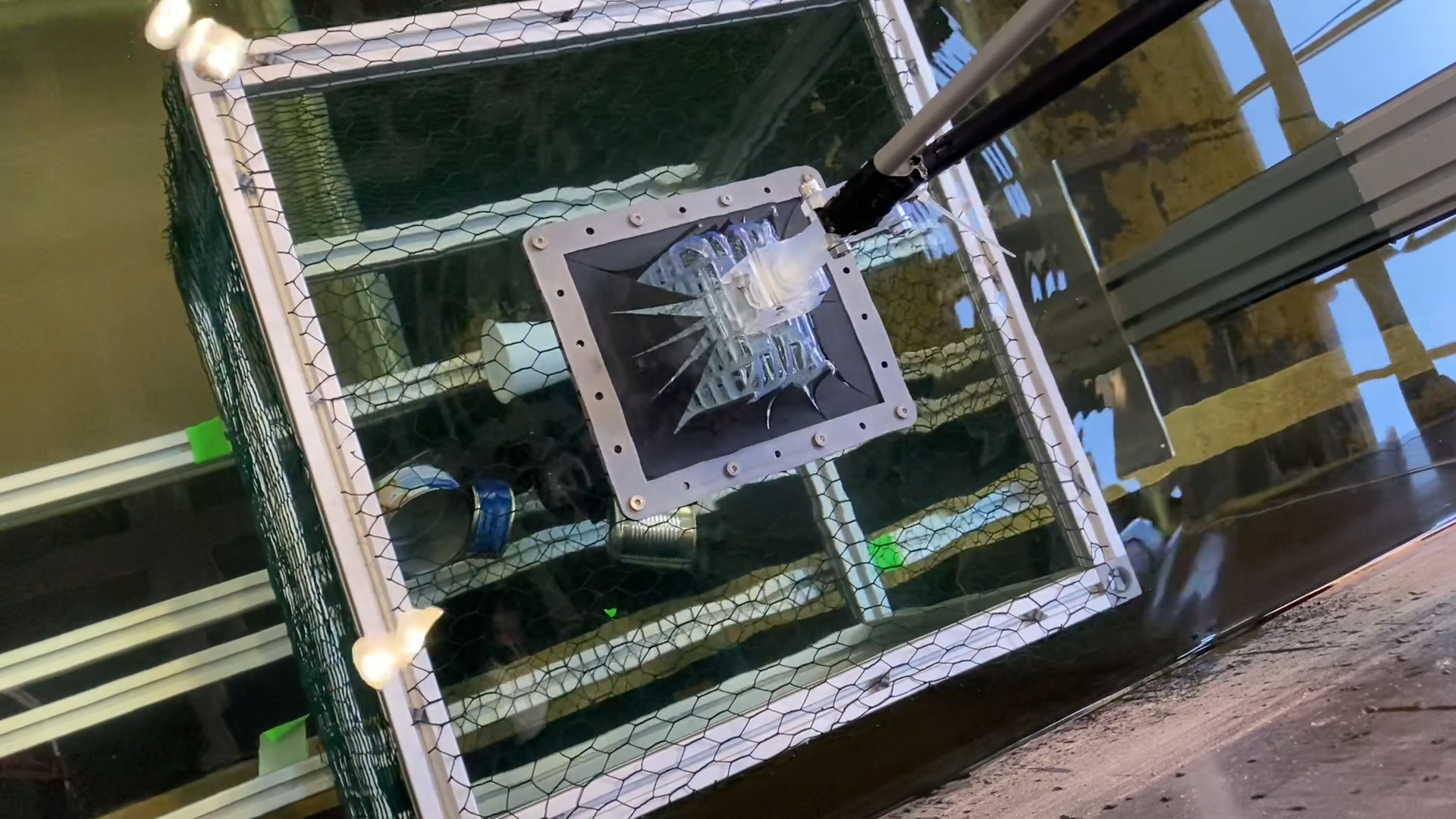
5. Litter is collected in a basket
A basket is deployed from the USV, and the collection UUV Tortuga takes each piece of litter to deposit it in the basket for transportation to the shore. The basket opening is specially designed to interface effectively with the gripper, and to prevent floating litter to escape back into the water.
The basket is not just a passive component, but actively sends signals to help the collection UUV localize itself relative to the opening.
-
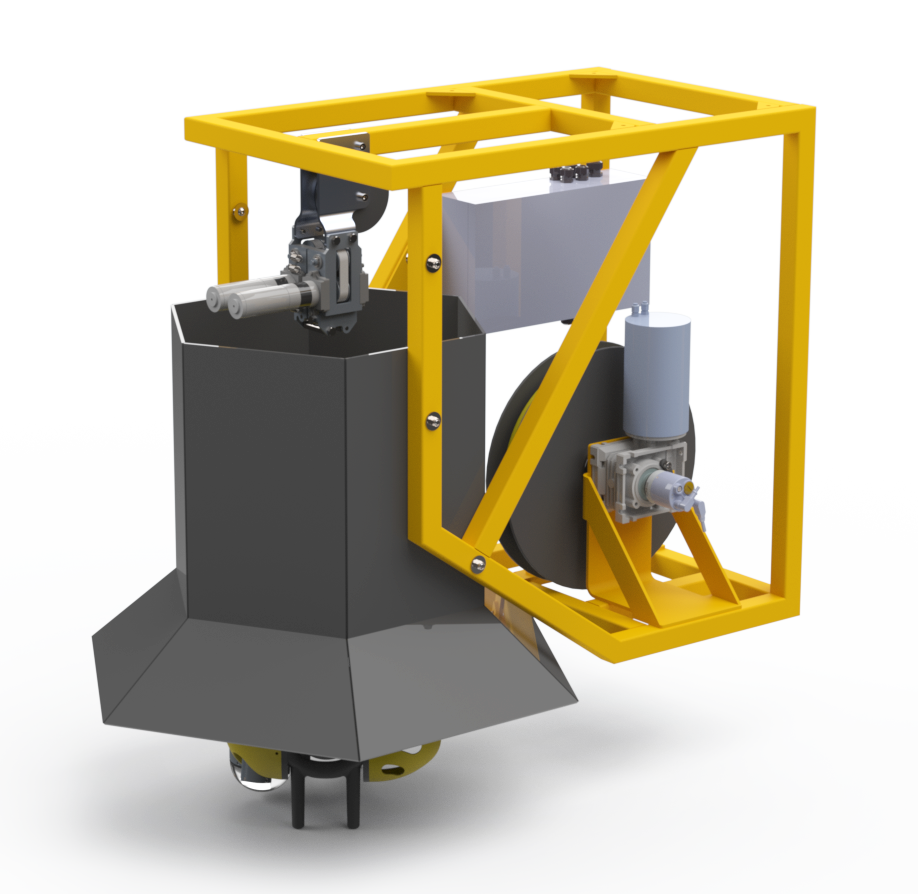
Collection Basket
-
LARS Mini Tortuga 2
-

Mini T
-

Sea CAT
-

Tortug
-

UAV Sea Clear
Project timeline
-
SEACLEAR project kick-off
January 2020
The SEACLEAR kick-off meeting took place on the premises of the project leader, TU Delft. During this meeting, we refined the objectives and tasks of the project with all the partners.
-
Concept and use cases
August 2020
As with any complex system, we must define the use cases before developing any of the technology involved. For the duration of this project, we will focus on two use cases, one being the tourism sector and the other port management.
-
Hardware: Robots
December 2021
At the core of our system are the robots that will do the actual work. SEACLEAR required the development of a new autonomous surface vehicle (SeaCAT), and a new underwater observation robot (MiniTortuga). Furthermore, a reliable way of deploying and retrieving all the robots is necessary.
-
Hardware: Sensors integration
December 2021
Sensing is the way our robots locate themselves and find litter. In SEACLEAR, we are mainly relying on cameras and sonars to search for litter, and we have to integrate these sensors with the rest of the equipment.
-
Hardware: Gripper
A key component for the collection of litter is the system's gripper, which needs to be mounted under the collection ROV. The gripper should be suitable for collecting a wide range of litter found on the ocean floor, while ensuring that no marine life forms are harmed.
-
Hardware: Collection basket
The collection basket is the place where the litter will be stored until it is safely transported to the shore. It must be compatible with the gripping system and must ensure that no litter escapes once collected.
-
Software: Local robot control
Due to signal loss underwater, the ROVs cannot rely on satellite positioning systems for their localisation. Therefore, we need to develop solutions for fusing different sensor data to estimate the position of the robots underwater. Furthermore, we develop advanced techniques for controlling the trajectories of the robots efficiently while in water.
-
Software: Litter identification
To collect litter, it must first be detected. To do this, we rely on machine learning techniques with deep neural networks. A key objective of these algorithms is to correctly distinguish between marine litter and marine life forms, so that we only collect what we intend to.
-
Software: Mapping
To coordinate the operation of the robots, we need sufficiently accurate knowledge of the ocean floor bathymetry. Identified litter must moreover be placed on this map, so that the robots know where to go to collect it. Our goal is to build this combined map of the ocean floor in an energy and time efficient way.
-
Software: High-level robot control
Besides the trajectory control needed for the robots, the SEACLEAR system must define higher level tasks for them. This includes the paths they will follow to detect the litter more efficiently, but also the order that the detected litter will be collected afterwards.
-
System integration
SEACLEAR is aiming to combine several individual components together, with a considerable amount of data that need to be shared between each component of the system. Therefore, we aim to develop reliable and efficient communication systems so that the computational intensive tasks can take place where it is more suitable.
-
Site trials and demonstrations
The end goal of this project is to demonstrate its capabilities on different sites, with different needs. For SEACLEAR we have identified two locations for performing these demonstrations: The Dubrovnik area (tourist use case), and the Hamburg Port (port use case).
-
System exploitation
Our goal is to make the SEACLEAR system commercially viable. We aim at exploiting the results of this project both by selling the system and by providing it as a service to local authorities, ports, or other stakeholders.
How do we innovate?
So far, collection efforts have focused mostly on surface waste, with only a few local efforts to gather underwater waste, always using human divers. No solution exists that exploits autonomous robots for underwater litter collection; the SeaClear project will develop the first. Our platform for search, identification, and collection of sea litter using UAVs and autonomous UUVs will innovate in the following technical directions:
-
online identification of debris versus marine life from underwater sensors
-
integrated underwater and surface mapping
-
underwater collection of small and larger-size litter
-
cooperative control of the robotic team
Who are we?
The SeaClear consortium consists of 8 European partners. It includes the two end-users mentioned above, an SME supplying proven hardware for our platform; an experienced marine system integrator; and four academic institutions with complementary expertise in underwater and aerial robotics, sensing, mapping, and control.

This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 871295.
The SEACLEAR project spans four years, running from January 1st, 2020 to December 31st, 2023.
Design & maintenance by Lichtbringer